

We work with a variety of data sources including BIM data and LIDAR scans and we are able to conduct our own surveys, scan and photography to ensure that the environments we produce are a true reflection of the real world.
Our driving simulator environments can be designed to work with all the leading driving simulators. Click here for more information the environments we develop for driving simulators and see below for a selection of projects we have delivered for the Road and Driving sector…
IPG Automotive: ViVID Visuals to Test a New Generation of Fords
Project Overview:
IPG Automotive was selected for the ViVID consortium to enhance and accelerate virtual testing of Ford electric commercial vehicles and Advanced Driver Assistance Systems (ADAS).
IPG’s CarMaker solution, used in the project, needed innovative 3D visual scenarios to convincingly represent real-world driving conditions.
Agility3 developed advanced 3D simulation visuals for IPG’s UK team, who integrated them into CarMaker’s MovieNX 3D engine to take realism to the next level.
Project Features:
Working closely with the IPG UK team to establish their needs, time scales, and preferred approaches, Agility3 created two detailed 3D scenarios to represent a diverse range of driving conditions and challenges.
One scenario depicted a “rural route, with bends and curves, a roundabout at each end, a crested hill, and an entrance to a dual carriageway. The other depicted a motorway with features designed to challenge systems such as lane keep assist, lane departure warnings, and Adaptive Cruise Control (ACC).
Solution Benefits:
Elliot Hemes, IPG Automotive UK’s MD, highlights that just one of the Agility3-developed scenarios in the CarMaker product used in the ViVID project is capable of representing over 13,000 possible test variations, just for the environment itself, before even adding traffic. This is a capability that “gets you to test conclusions much quicker” and has been “of clear benefit for the ViVID project and its consortium, increasing both our and Agility3’s visibility in the process.”
Learn more from the following video…




Renault – Guyancourt SCANeR Driving Simulator Environment Upgrade
Project Overview:
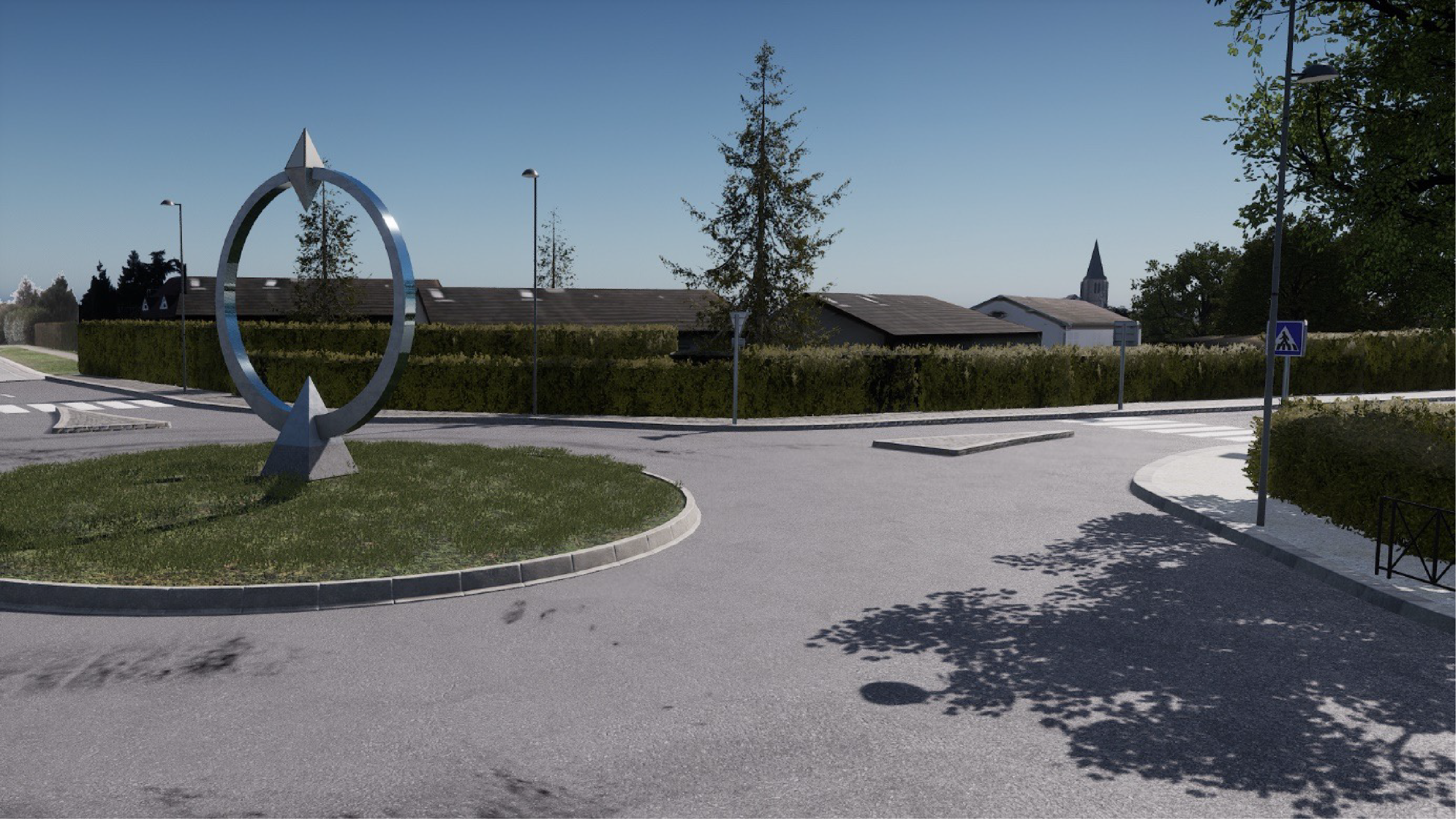
The team at Renault have a library of 3D environments, designed to work with SCANeR from AVSimulation, that are used to support development activites. With the recent release of the SCANeR UXD Engine, built upon Unreal Engine and promising AAA game quality visuals, Renault were keen to upgrade one of their frequently used 3D models to benefit from this development and to understand what is now possible.
Project Features:
The project used Renault’s existing 3D model as the starting point and went through 3 iterations of upgrade:
- Converting the existing OpenFlight-format Guyancourt model to an Unreal Engine 4 environment, and making it work with the SCANeR UXD Engine. This sent the foundations for future upgrades and enabled the model to perform well and benefit from improved scene lighting, dynamic shadows, and sky and weather effects.
- 3D surfaces were upgraded to Physical-Based Rendering (PBR) materials and old foliage models were replaced with vastly improved UE4 trees, grass, and foliage. This was done using streamlined processes developed by Agility3 so represented a big step up in visual appearance with relatively low cost.
- The final upgrade focussed on remodelling buildings and object for greater realism and detail, and adding emissive lights to showcase the very best of what SCANeR and Unreal Engine can offer.
Solution Benefits:
The upgraded 3D environment remains correlated to the original model, so Renaults library of scenarios still work meaning no costly development of new scenarios or logical maps.
The enhanced environment now opens up a variety of potential new use cases where visual accuracy is important, it provides an improved experience for driver-in-the-loop research and gives the team at Renault valuable knowledge of what is now possible, to steer future simulator development.



Midlands Future Mobility – M6 Junction 2 SCANeR Driving Simulator Environment
Project Overview:
As part of the Midlands Future Mobility (MFM) project, HORIBA MIRA came to Agility3 for development of a highly accurate 3D model of the M6 and M69 near Coventry and the complex junction where they meet. This environment complements HORIBA MIRA’s diverse virtual testbed and allows them to ensure Connected and Autonomous Vehicles are safe, secure and functionally correct.
Designed specifically for use with SCANeR from AVSimulation and the new UXD Engine, built on Unreal Engine from EPIC Games, the 3D model needed to be highly accurate to the real world and be accompanied by an OpenDRIVE format logical map.
Project Features:
A key project requirement was a high level of geographical accuracy and correlation between the visual model and the logical OpenDRIVE model. This was achieved by conducting a LiDAR and video survey of the area.
Also important to the research being carried out were the visual accuracy and visibility of road markings and signage, including representing wear and tear, damage, and the ability to show a range of messages on the overhead gantries and message boards along the route.
Unreal Engine was used to create realistic grass and foliage, and to benefit from the features available in the new SCANeR UXD Engine.
Solution Benefits:
The delivered 3D model and accompanying openDRIVE logical map enable HORIBA MIRA and the MFM team to trail Connected and Autonomous Vehicle systems in a synthetic environment closely matching the real world, ahead to conducting trials on the road. This reduces risk, improves safety and enables the AV developers to refine their systems ahead of trials on the road, saving money and reducing the time for development.
This paves the way for the manufacturers’ development of safer, more secure and functionally correct CAVs.
Bence Beke, Senior CAV Engineer at HORIBA MIRA, commented: “When we started this project, we were slightly concerned given the extent of the area and the novelty of the simulation platform’s visual engine. As the project progressed, these concerns were dispelled. Agility3 exhibited efficient communication, rapid issue resolution and dedication to deliver to our expectations.”
“Agility3 took the time to understand our expectations and requirements in the beginning and kept us up to date with progress as well as any issues encountered throughout the project. They went out of their way to solve these issues. In the end, Agility3 delivered a model we are impressed with and will certainly help us achieve our goal to ensure CAVs are safe, secure and functionally correct. “



Warwick University – 3xD Simulator
Project Overview:
This project involved WMG, a department of the University of Warwick who required an accurate virtual environment for their revolutionary Connected and Autonomous Vehicles (CAV) 3xD Simulator.
Project Features:
One of the key requirements was that the virtual environment should include accurate representations all objects present in the real world, such as kerbs, markings, buildings, hedges, and motorway gantries. These locations included a two-kilometre route around Canley in Coventry, and a ten-kilometre stretch of the M42 between junctions four and six.
Solution Benefits:
- They can now conduct safe trials on these key routes, as well as test, validate, and refine any newly developed connected and autonomous vehicle systems before taking them onto these public roads.
- This also has the potential to reduce the costs and time involved, bringing the future of mobility on our roads closer.
- The digital model has allowed WMG to replicate the geo-locations of V2X capable street furniture. This has supported research into the real world and real time simulation of RF and 5G in communicating useful information, such as lane speed limits and other safety notifications, directly to driver.

Woolwich Arsenal – SCANeR Driving Simulator & VR Environment
Project Overview:
In support of the Smart Mobility Living Lab, TRL commissioned a detailed LIDAR scan of this area of South London. TRL then came to us to transform the Building Information Modelling (BIM) data generated from the scan into:
a) an environment that can be used in TRL’s state-of-the-art driving simulator, and
b) a “VR-Ready” virtual environment that can be used in immersive VR Experiences using VR headsets such as the VIVE from HTC, with an accompanying example experience in which users experience being driven around the Woolwich area in a driverless vehicle.
Project Features:
The key project requirement was that both the driving simulation and VR versions of the environment were a faithful digital representation of the real area with roads, markings and roadside objects modelled to a very high degree of accuracy. Performance is always a key consideration, particularly when Virtual Reality is concerned, and the deliverables were optimised to achieve high framerates while still presenting the user with rich and detailed visuals.
Solution Benefits:
The delivered driving simulator environment and accompanying VR-Ready version can be used in the Smart Mobility Living Lab’s simulation suite, where autonomous vehicle systems can be trialed and tested in a “digital twin” of the real world. Issues can be found and addressed and risks mitigated ahead of taking autonomous vehicles out into the real world to be tested on the public roads.



Greenwich GATEway – Driving Simulator Environment
Project Overview:
This highly realistic geo-specific virtual environment was used within TRL’s driving simulator to support user trials as part of an investigation into the way that humans behaved when sharing the road with autonomous vehicles. This research trial was part of the wider Greenwich GATEway project.
Project Features:
The key project requirement was that the environment was a recognisable representation of the Greenwich Peninsular with roads, markings and roadside objects all modelled to a very high degree of accuracy. To achieve this, various forms of data such as vector data, LiDAR data, aerial photography and on-site photography were sourced to ensure that a high level of accuracy was achieved.
Not only was the virtual environment highly realistic and highly accurate, it was also configured to run effectively and efficiently on TRL’s SCANeR driving simulation software developed by AVSimulation.
Solution Benefits:
- This environment enable TRL to present the participants of their trial with a highly realistic, accurate and detailed representation of the trial area. This meant that participants were not distracted by the quality of the environment and focused on the trial facilitating better results for the research.
- GATEway Project Lead and TRL Academy Director, Nick Reed said:
“Our requirement was for a 3D model of the Greenwich peninsula to use in a driving simulator study as part of the £8m government and industry funded GATEway project on automated vehicles. We were pleased to award this challenging task to Agility3 after they provided a very clear proposal that detailed what they would produce, how they would produce it and clearly articulated how they would manage the process – and all within our time and budgetary constraints. The model produced was of a very high standard, working perfectly in our real-time driving simulator and enabling our trials to be completed on schedule. Throughout the process, Agility3 offered clear and consistent communication on progress and a responsive, collaborative approach producing results that exceeded our expectations. I would not hesitate to work with Agility3 on future simulation projects.” - The results of this fascinating trial can be seen here.





Norwegian Cycle Track – Virtual Reality Environment
Project Overview:
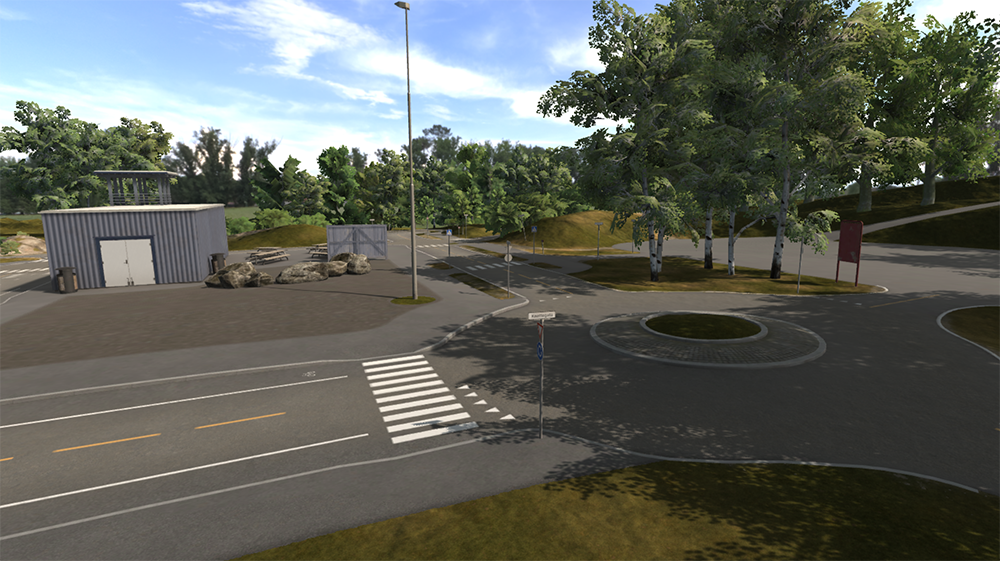
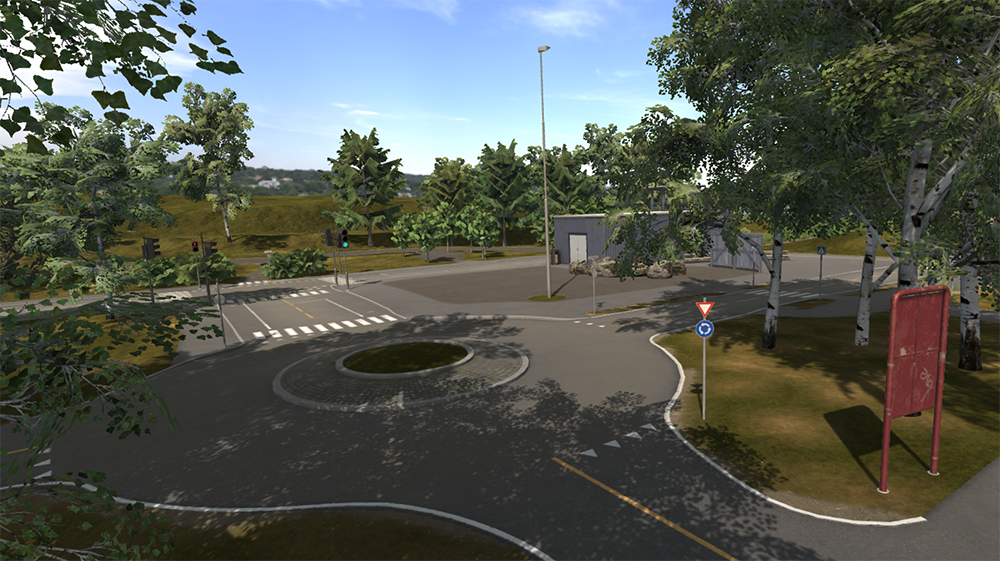
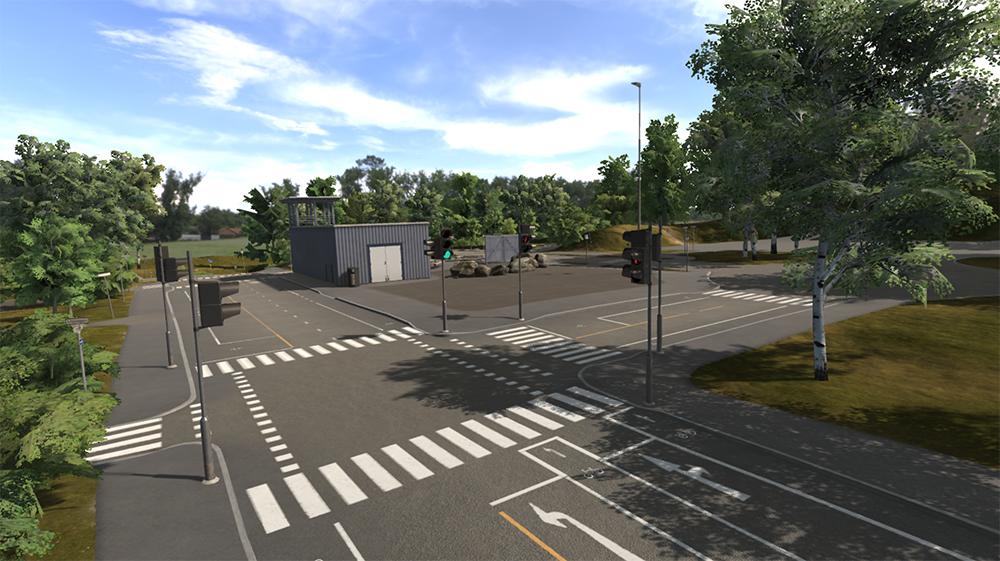
The requirement for this project came from SINTEF, one of Europe’s largest independent research organisations, who needed a highly realistic Virtual Reality environment of a real cycle track in the Trondheim area of Norway. This was for use within the Virtual Reality cycling simulator they were developing to research what causes children to become distracted when they are cycling.
Project Features:
Using a combination of height data, aerial photography, videos of the track and our in-house modelling expertise we able to develop the virtual cycle track environment to a very high degree of geographical accuracy and to a very high level of realism. Our modelling team were able to bring this high level of realism by harnessing the various lighting effects available within the Unity games engine which ensured the environment appeared life-like. The environment contained a range of features such as various junctions, road markings, signage, traffic lights, vegetation and more.
As the environment was to be used with VR and with a bicycle and by children, it was crucial that the environment not only looked great but that it was optimised to run efficiently to reduce the chance of motion sickness. Our development team ensured this through regular internal testing in our own VR set-up.
Solution Benefits:
- Taking on this project for SINTEF allowed them to focus solely on setting up their VR cycling simulator without having to worry about also developing the virtual environment.
- The high level of realism and accuracy of the virtual environment helped to enhance the quality of their research project.
- Jo Skjermo, Lead Research Scientist for this project who said:“SINTEF are very pleased with the 3D terrain of the Eberg Traffic Arena delivered by Agility3. The landscape is very close to how it looks in reality and gives you a very good impression of being there when using VR. This was confirmed from the preliminary test with children who are familiar with the real-world site. This was important for us to confirm, so that we can use it as an evaluation tool. Not only was the quality of the delivered environment very high but working with Agility3 was also very straightforward and easy.”
Thailand – Driving Simulator Environment
Project Overview:
We developed a geo-typical environment representative of various areas of Thailand to be used within our clients driving simulator in support of commercial truck driver training.
Project Features:
Through their driving simulator, our client wanted to improve safe driving of truck drivers in various types of driving environments around Thailand. Therefore, the driving simulator environment we developed comprised a range of different and challenging driving areas including urban, suburban, countryside and mountainous regions. Various road types and configurations were also used with complex junctions, roundabouts and motorways.
Developing the environment using gaming technology we were able to create effective lighting settings which made the whole environment look highly realistic in both day and night scenes.
Solution Benefits:
- Taking on the development of the virtual environment for our client allowed them to focus on other areas of their project without having to worry about the environment.
- The environment formed a key element of a simulator training system that enabled effective training for commercial truck drivers who could practice driving in a range of complex, hazardous environments that would be near impossible to practice on in real life.



Driving Simulator Demonstrator – Virtual Reality Application
Project Overview:
We developed this demonstration to provide a flavour of our capability in providing effective Virtual Reality training aids, in this instance, to support driver training and hazard perception.
Project Features:
Whilst immersed in a virtual environment through a head mounted display and using a steering wheel and pedal set-up, users drive themselves around a residential area all while being aware of potential hazards that can and do present themselves. After the hazard appears and the user is required to take action, statistics are collected and presented on how the user performed in reacting to the hazard.
Solution Benefits:
- This demonstration showcases how a VR driving simulator could be used for driver training and especially in the area of hazard perception and awareness.
- It helps users track their improvements by collecting data on performance and presenting this back to them.

Highway Works Safety Trials – Driving Simulator Environments
Project Overview:
We have provided a variety of driving simulator environments in support of trials for different road work configurations, some covering up to 80km.
Project Features:
Features that are included within each environment vary for each project but can and have included smart motorways, refuge areas, variable message boards, varying speeding limits, varying lane widths, works vehicles, gantries, and various cone, sign and barrier configurations.
The environments can also be configured to support daytime and night-time simulated driving and are all designed specifically to run on our clients driving simulation software.
Solution Benefits:
- These environments enable our clients to conduct thorough research on the suitability and effectiveness of various roadwork configurations created to their specification.
- The results of these research trials allow them to help informed plans and decisions made for managing the road networks.
- We can configure environments to contain various switching options for lights and other dynamic elements which our clients can control themselves.


There is 1 comment
[…] Find out more about the Greenwich GATEway project here. […]