
Introducing the Agility3 OpenDRIVE Validator (Beta)
David Turner
4/2/20262 min read
We’re excited to announce the launch of our new online OpenDRIVE Validator, now available for free on the Agility3 website. This tool, currently in beta release, is designed to help engineers and simulation developers quickly assess and improve the quality of their OpenDRIVE road networks.
As virtual testing becomes increasingly widespread across automotive and simulation ecosystems, the quality of an OpenDRIVE map plays a crucial role in ensuring reliable behaviour in simulators, routing engines, and autonomy stacks. Our Validator helps identify the issues that matter most—connectivity, lane‑to‑lane transitions, schema consistency, and structural correctness—so you can focus on research, testing and developing the next generation of vehicles.
👉 Try it now: https://agility3.co.uk/opendrive-validator
What the Validator Does
The Validator performs a set of targeted checks to help ensure that an OpenDRIVE map is structurally sound and simulator‑friendly:
✅ Connectivity & Topology Checks
Verifies road‑level and lane‑level continuity
Detects missing or inconsistent predecessor/successor lane links
Identifies disconnected islands, dead loops, and unreachable lanes
✅ Geometry & Structure Checks
Validates road lengths, lane section order, centre‑lane presence, and geometry consistency
Flags mismatches between declared OpenDRIVE standards and actual file content
Checks structural assumptions based on the OpenDRIVE 1.6 or 1.7 schema
✅ Schema Compliance
Currently the Validator works to OpenDRIVE 1.6 and 1.7 as its reference standards.
If users upload maps written to a different standard (e.g. 1.4), the validator will still generate results but may mark some schema items as warnings due to spec differences.
Automatic Fixes – Included for Free
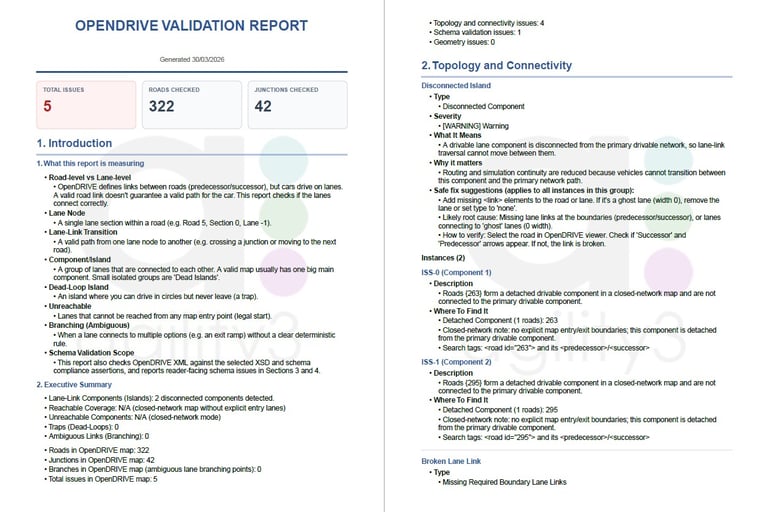
One standout feature of the Validator is its ability to attempt automatic repairs on detected issues. After submitting a map we’ll send you:
A detailed PDF report of your OpenDRIVE file
An auto‑fixed version where the validator has done its best to address any issues found
A report summarising the changes applied
While automatic repairs won’t resolve every issue, they offer a significant time‑saver—especially early in a map’s development lifecycle.
How It Works
Upload your .xodr format OpenDRIVE map via the link above
Provide your email address
The Validator processes your map
You receive your results directly to your inbox
This beta service is free to use and we welcome feedback to help prioritise improvements and next‑stage features.
Ideal Users
This tool is built for:
Simulation and ADAS/AV teams working with OpenDRIVE environments
Content creators building large‑scale HD maps
Research teams validating academic or custom road networks
Anyone integrating OpenDRIVE maps into simulators, tools, or pipelines
What’s Next?
We’re already planning the next iteration of the Validator, which could include:
Broader OpenDRIVE version support
Optional visual debugging (overlaying issues directly in interactive 3D views)
Deep geometry validation (curvatures, offsets, road shapes)
Export to other map formats
If you try the Validator, please send us your feedback—your insights will directly shape future updates.
If you have any questions about the Agility3 OpenDrive map validator or how we help organisations to conduct automotive research or de-risk major development projects using simulation, please contact us on +44 (0)1438 488066 or by emailing info@agility3.co.uk .